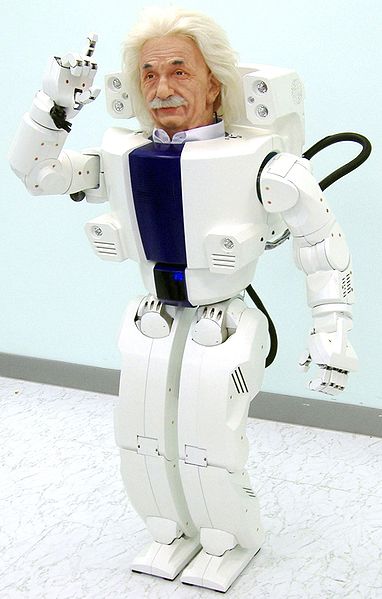
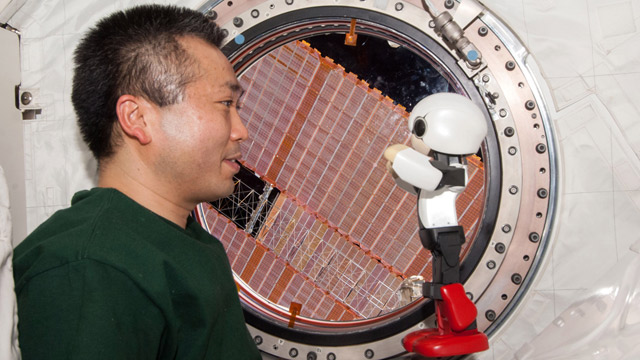
Humanoid robotics ≠ intelligence
We appear to have become obsessed (and distracted) by the idea that simulating the form of humans will simulate our intelligence.






Affordance


Internal models



Cooperation
- Robots are 180mm dia, 150mm high
- Two Camera above to process the pictures

- CMU Robosoccer >small size
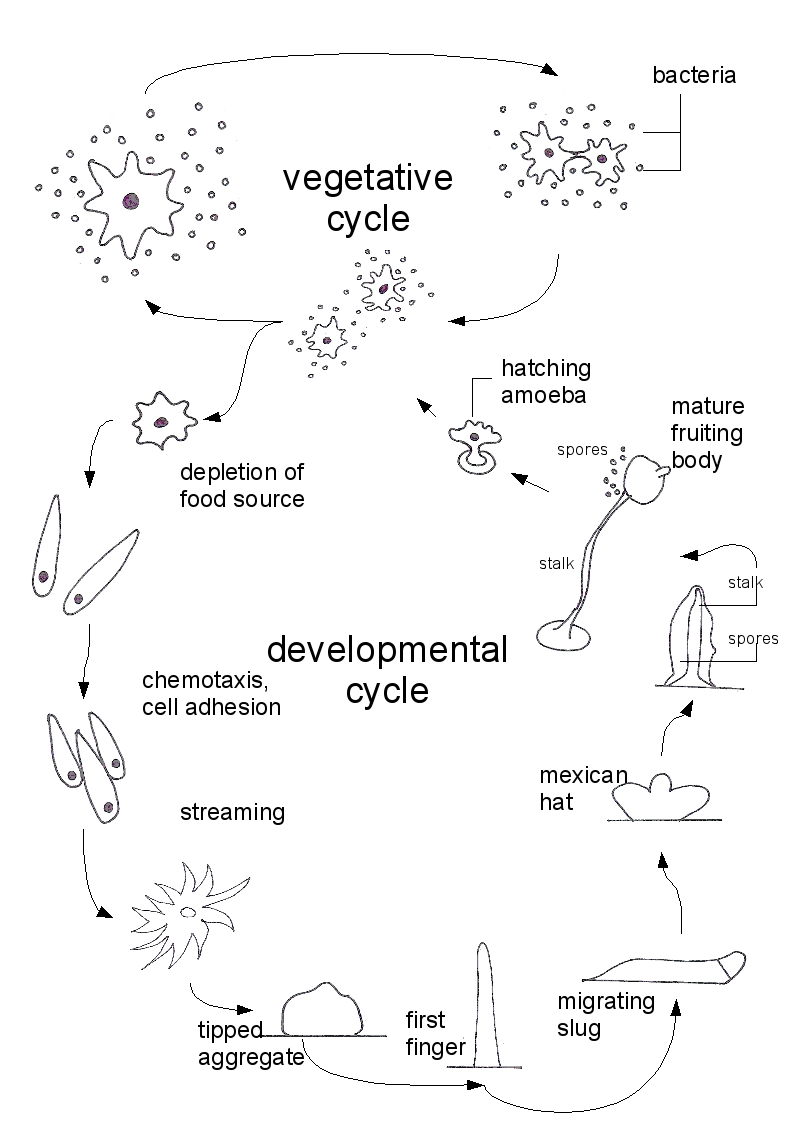
Slime mould (Dictyostelium)
Evolutionary
Brandis Gollem project Simulation of Evolution by Natural Selection Karl Sims Karl Sims on Daniel Dennets Nicolas Lassabe Cornell Computational Synthesis Lab (CCSL)