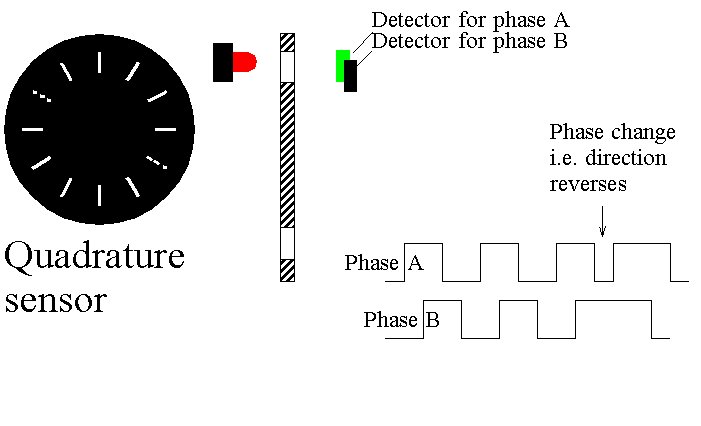
Both are passive devices, both give binary information
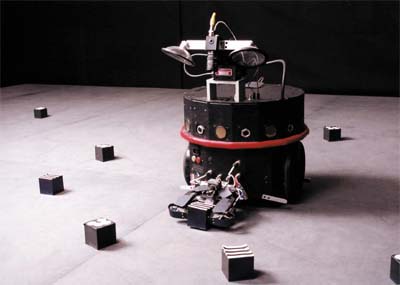
Taste: Nomad
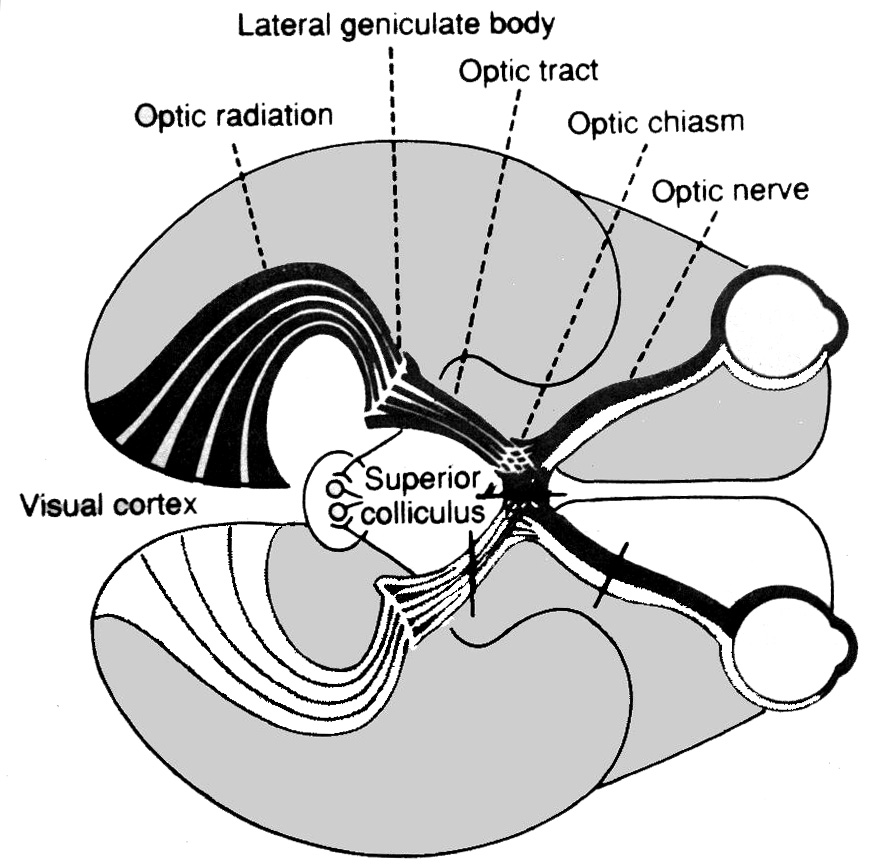
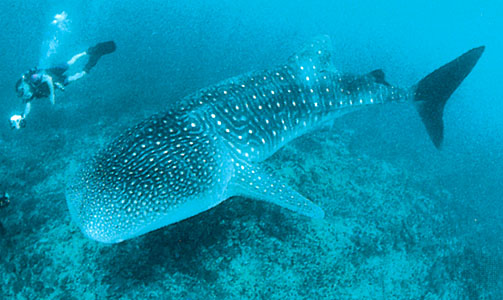
Visible light: White bellied sea eagle
Visible light: Cats
Domestic cat Felis catus
Panthera Leo
Visible light
Video Cameras
Light intensifiers
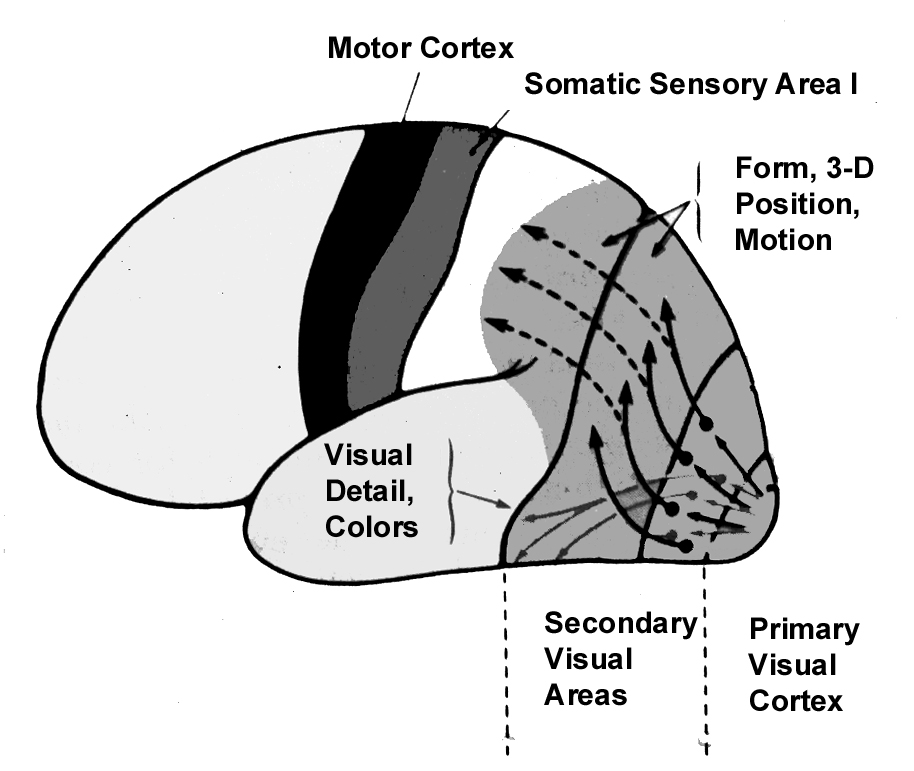
Much interest in vision processing, can track objects in sequence of pictures
Simplistic algorithms eg edge detection
Canny edge detection
Lena Soderberg
Low freq EM Magnetic: swallow
Quasi-static EM fields.
Hirundu rustica
magnetic field
Earths field
Navigation
Problems indoors where it gets distorted
Self generated magnetic field
Good for position tracking eg for VR applications
Infrasound
Loxodonta africana
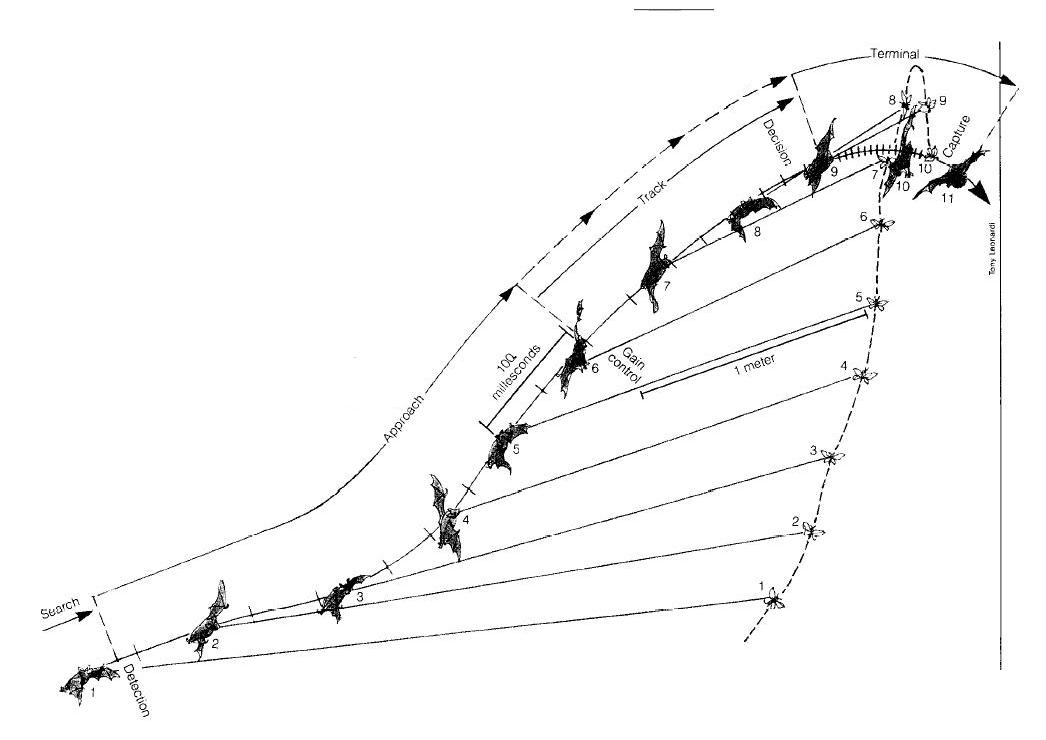
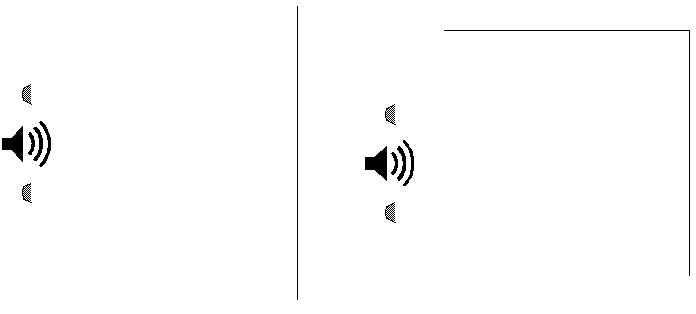
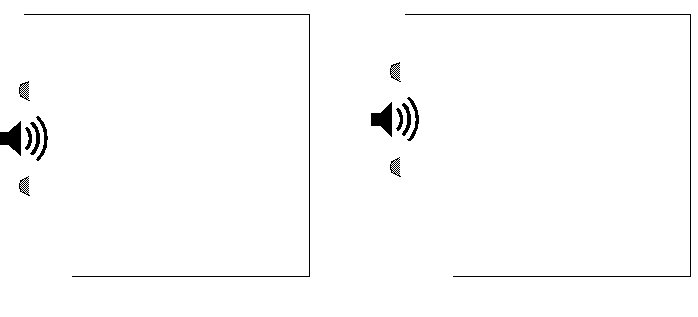
Ultrasound
Bats use continuous modulation (CM), frequency modulation (FM) or a mixture of both (hockystick)
The UK Pipistrelle uses CM at frequencies of 39kHz 45kHz 55kHz depending on species
Due to attenuation the range is probably around 20 metres for bats
Myotis lucifugus uses scans from 70KHz-33KHz in .2 seconds
echo location can be used in humans to aid navigation (e.g. Daniel Kish)
Myotis lucifugus (FM 70KHz-33KHz in .2 seconds) Brown bat
Big brown bat (Eptesicus fuscus) flying in an obstacle test with rows of vertically hanging plastic chains. The bat's head, ears, and sound beam are aimed toward the open path to the front. Credit: James Simmons
Tursiops truncatus (bottle nose dolphin)
Sound
Ping and listen devices discard 90% of information
Military interest, but again humans used as the intelligence
Rotary angle sensor
Passive and active sensors
Transducer/sensor
quantity
strain gauges
Force. Change in resistance implies distortion of material implies force
Linear variable differential transformer
Distance. Via magnetic coupling to a coil
Hall effect
Magnetic field. Electrons in semi-conductor move under the magnetic field to a gate
Laser range finder
distance. Time of flight of photons from transmitter, reflected off object
ultrasound modules
distance. Time of flight of sound.
GPS receivers
position. Time of flight of timed RF photons from satelite to the receivers
Accelerometers
linear accelerations. Measure acceleration via force (Newton $F=ma$) see strain-gauges
Gyrometer
angular accelerations. Several mechanisms including 'tuning forks' and optical fibres. Old style used spinning gyroscopes
Tachometers
angular velocity
Kinematics part 1
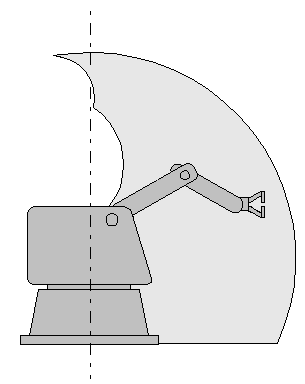
Degrees of freedom to locate (3DoF) and orientate (3DoF) a body
Redundant Dof allows reach around (human arm from shoulder to wrist has approx 6DoF, but then we can move the trunk to reach around)
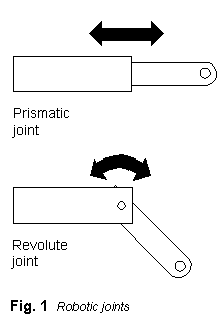
Revolute and prismatic joints
Active (contribute to DoF) and Passive
Serial chains, parallel chains and combination linkages tend to trade off considerations such as reach, range of movement, weight and strength.
Lower joint pairs
Name (Symbol)
DoF
contains
type
Revolute (R)
1
R
planar
a hinge
Prismatic (P)
1
P
planar
an aerial
Helical (H)
1
R+P
3D
a screw
Cylindrical (C)
2
R+P
3D
Spherical (S)
3
3R
3D
shoulder
Sliding/Flat (F)
3
R+2P
3D
Revolute (R) and Prismatic (P)
Serial chains (Cartesian)
Gantrys PP
Serial chains (revolute)
JCB RRRR
SCARA- PRR or RRP
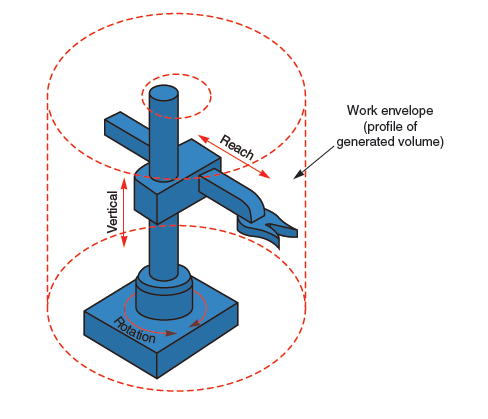
Cylindrical robot RPP
Parallel chains (Stewart platform)
Passive and active joints
Only active joints contribute to degrees of freedom
Passive degrees of freedom needed to remove motion constraints.