Why is artificial intelligence so concerned with chess machines when Elephants don't play chess? (Title of a paper by Rodney Brooks[brooks1990elephants])
What is intelligence?
Is animal intelligence different to machine intelligence?
Who decides what is intelligence?
What shades of intelligence?
Howard Gardiner identified 8 types of intelligence
Linguistic
Logical/Mathematical
Spatial
Bodily-Kinesthetic
Musical
Interpersonal
Intrapersonal
Naturalist.
But there can be other taxonomies of intelligence types, e.g. for machines
ability to recognise patterns (face recognition software)
robotic (ability to use tools)
Language understanding and translation - e.g. google translate
Does the brain give us the ability to predict outcomes?
The answer is probably yes. If so the key question is
How does the brain give us the ability to predict outcomes?
See Miall[Miall93:_is_cereb_smith_predic]
A Smith predictor model of the brain
Resilient machines (2006)
Key paper is Bongard, Zykov and Lipson 2006[bongard2006resilient] other papers are lipson [bongard2006automated]
The robot is the starfish. It has a fixed morphology consisting of
8 joint sensors,
2 tilt sensors and
8 joint actuators.
Most robotic systems get the humans to construct a mathematical model of the robot kinematics and/or dynamics and then plan movement against that model.
Approach is expensive (time to construct a valid model), and requires calibration
Robot does not have an explicit model of itself
Methods like SLAM model and adapt to change the environment
Very few robots allow adapt to changes to their own morphology
Premise, create multiple internal models and use a system identification like approach to select the best
Don't freeze the system identification process during use
Rather look for disagreements between model and sensors (this is how Kalman filters work!)
When disagreement is high, re-initiate the 'model generation and evaluation' cycles.
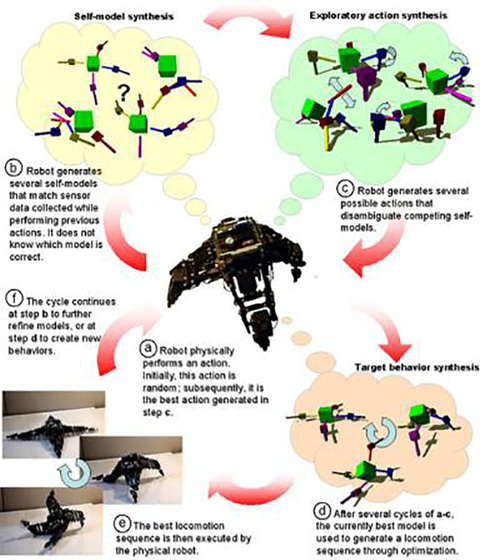
2 Start at A, cycle A-C around 16 times to build the model. Evaluate walking in simulation, Best simulation is implemented on the robot. From[bongard2006resilient]fig~1
The 'self modelling video has the following parts':
Part I three cycles of model synthesis and action synthesis (Fig. 1A-C).
Part II locomotion synthesis using the best self-model (Fig. 1D).
Part III the physical robot executing the best behaviour (Fig. 1E).
Part IV a sample experiment after the robot suffers damage. The robot is shown alternating self-modelling with exploratory action (Fig. 1A-C); then, the best compensatory gait is shown running on the self- model (Fig. 1D), after which it is executed by the physical robot (Fig. 1E).
Part V some other compensatory gaits,
Bongard and Lipsen Starfish self modellingBongard and Lipsen Starfish locomotion