This material available on the internet from page http://www.reading.ac.uk/~shshawin/LN/ and then follow the Haptic devices link .
Parallel mechanisms may be the answer but often a parallel mechanism has a smaller workspace, limiting the realism of the haptic interface.
System stacking, An intelligent vibrotactile device on a back drivable device on an admittance device!
--------------
Other examples of haptic interfaces are in the haptics gallery
---------
| kinematics = maglev |
| active Dof = 6 |
| weblink = www.butterflyhaptics.com |



| kinematics = maglev |
| active Dof = 1 (+3 Phantom) |
| weblink = |


--------
| kinematics = RRR (Phantom based) |
| Active DoF = 3 |
| weblink = www.reachin.se |



| kinematics = RRR |
| Active DoF = 3 |
| weblink = www.sensable.com |


https://www.youtube.com/watch?v=ZvOXyOhZVIM http://www.geomagic.com/en/products/sculpt/overview


| kinematics = PPPRRR |
| active DoF = 6 |

kinematics = RRR?
weblink www.haption.com



6 Dof Pen like interface kinematics = RRRRRR
mpb-technologies, Canada

| kinematics = RPP |
| active DoF = 3 |
| weblink |

| weblink |


--------
Novint Falcon
| kinematics = Parallel (Forcedimension based) |
| Active DoF = 3 |
| weblink = www.novint.com |




| kinekmatics = ((RR)(RR))((RR)(RR)) |


(doi=10.1109/TOH.2009.5)
--------
| kinematics = (PPPP) |
| active DoF = 4 (1 redundant) |
| weblink = Makoto SATO Lab |
| weblink = Cyverse |







Microsoft sidewinder

--------

| weblinks = http://haptic.mech.northwestern.edu |
| http://www.comoco-inc.com/ |
| http://www.cobotics.com/ |

Dr Vincent Luboz and Dr Fernando Bello
| weblinks = www.sfu.ca |

| joint repeatability 1degree |
| Max force = 12 N |
| kinematics= ungrounded |
| weblink www.immersion.com |




weblink



Encounter haptics

--------
AR-tracking.com


 Sculptor RGA (Robotic Guidance Arm)
Sculptor RGA (Robotic Guidance Arm)
| Product | DoF | Fmax | Fcont | Stiffness | Median Workspace | Endpoint inertia |
| Freedom cubic | 3 | 2.5N | 290mm | |||
| Omega.x (Force dimension) | 3 | 12N | 12N | 14.5N/mm | 110mm | |
| Falcon (Novint) | 3 | 9N | 8N/mm | 100mm | ||
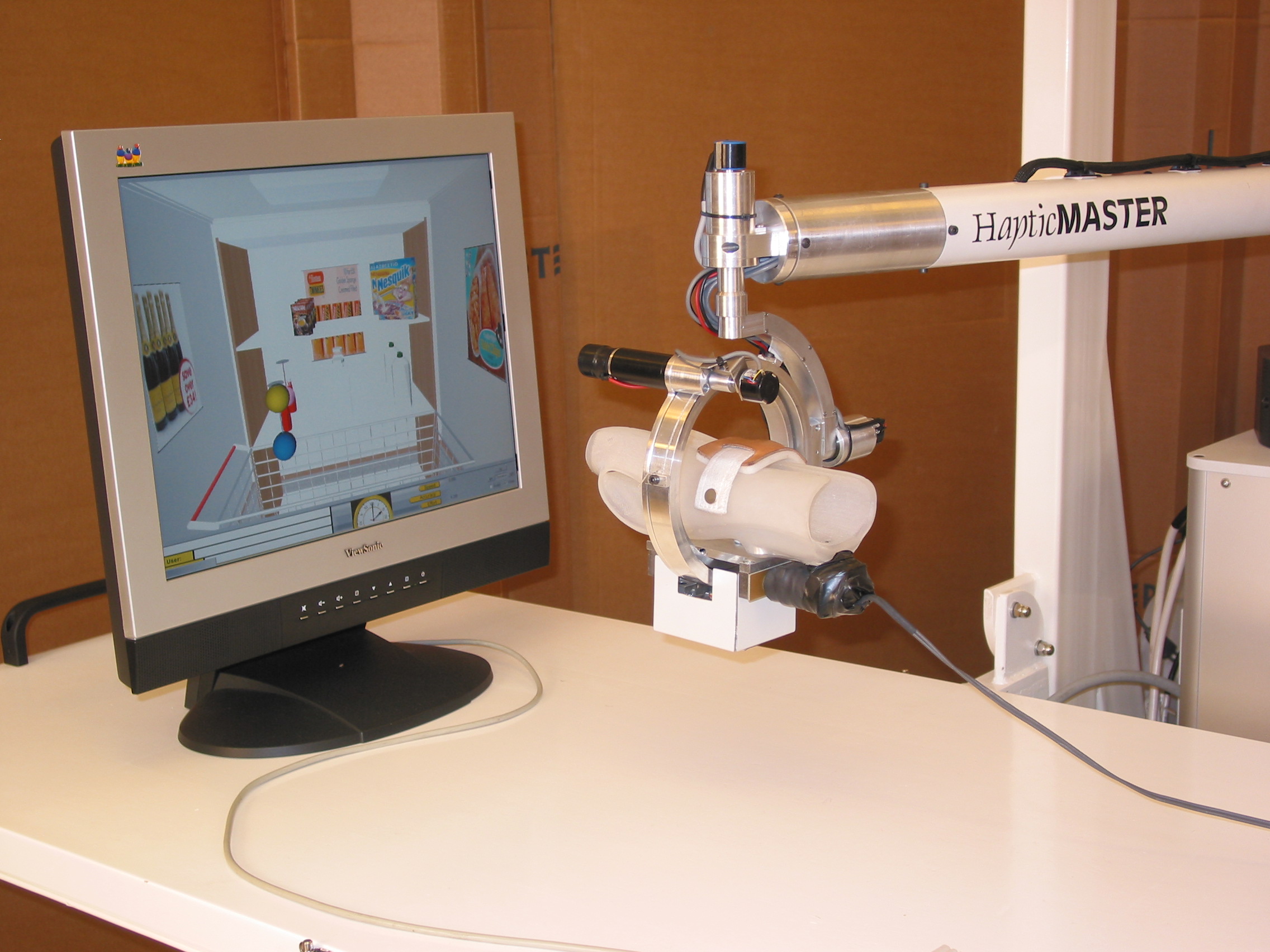
| HapticMaster (FCS-Moog) | 3 | 250N | 100N | 50N/mm | 360mm | 2000g |
| Omni (Sensable) | 3 | 3.3N | 0.88N | 1.26N/mm | 120mm | 45g |
| Phantom 1.5 | 3 | 8.5N | 1.4N | 3.5N/mm | 267mm | 75g |
| Quanser Mirage | 3 | 100N | 25N | 2N/mm | 300mm | 300g |
| Quanser planar | 2 | 10.1 | 3.1N | 270mm | ||
| Quanser wand | 3 | 9 | 3N | xx | 420mm | xx |
| Virtuose 3D15-25 | 3 | 15N | 5N | 0.8N/mm | 250mm | |
| Virtuose 6D35-45 | 6 | 35N | 10N | 450mm | ||
| Virtuose 6D40-40 | 6 | 100N | 30N | 400mm | ||
| Maglev 200 | 6 | 40N (3.6Nm) | 50N/mm (5.1 Nm/deg) | 24mm /8 deg | 510g | |
| Entact W5D | 5 | 4N (.112Nm) | 1.4N | 10N/mm | 135mm /50 deg | 42g |
http://www.reduxst.com/products/

http://www.tactustechnology.com

http://tacticalhaptics.com
s  |
s  |




